РэЛЏЫљЗЂЯжЛљгквКЬЌН№ЪєНсЙЙЩЋЕФПЩЮБзАШсадЛњЦїШЫ

ЁЁЁЁШсадЛњЦїШЫЪЧвЛИіаТаЫЕФСьгђЃЌДгЛњаЕбЇЃЌЮяРэбЇЕНЩњЮябЇвбОЛёЕУСЫдНРДдНЙуЗКЕФЙизЂЁЃОпгаИеадЖдгІЮяЕФДЋЭГВФСЯКмФбЪЕЯжСщЛюЕизЊБфЮЊЖржжаЮЬЌЁЃяиЛљвКЬЌКЯН№ОпгагХвьЕФЕМШШадКЭЕМЕчадЃЌЕЭеГЖШЃЌСМКУЕФСїЖЏадКЭЩњЮяЯрШнадЃЌдкЯШЧАЕФбаОПжаЃЌЦфеЙЯжГіСЫдкЭтМгЕчГЁКЭЮўЩќН№ЪєЕФДЬМЄЯТВњЩњБфаЮКЭдЫЖЏЕФФмСІЃЌдкШсадЛњЦїШЫСьгђБЛМФгшКёЭћЁЃ
ЁЁЁЁяиЛљКЯН№вЛжБвдвјАзЩЋЕФН№ЪєЙтдѓЪОШЫЁЃДЫДЮбаОПБЈЕРСЫвКЬЌН№ЪєБэУцдкЮўЩќН№ЪєЛђЕчГЁЕФДЬМЄЯТПЩВњЩњБфЩЋЯжЯѓЃЌЪЙЕУвКЬЌН№ЪєОпБИСЫРрЫЦеТгуЕШЭЗзуИйЖЏЮяШсШэПЩБфаЮБфЩЋЕФЬиЕуЁЃбаОПБэУїЃЌяиЛљвКЬЌН№ЪєЕФБфЩЋЪЧгЩгкЦфБэУцВњЩњСЫАйФЩУзКёЕФШ§бѕЛЏЖўяиНщПзБЁФЄЃЌЦфЩЋВЪРДдДгаИЩЩцКЭЩЂЩфСНжжаЮЪНЃЈЭМ1ЃЉЁЃЕБЗХжУдкЪЏФЋЛљЕзЩЯВЂгыЕчНтжЪШмвКжаЕФТСВЛьКЯЪБЃЌгЩгкШ§бѕЛЏЖўяиБЁФЄЕФШ№РћЩЂЩфКЭБЁФЄ-Н№ЪєНчУцГіЯжЕФЮЂФЩУзПеЧЛЃЌвКЬЌН№ЪєБэУцЩЯГіЯжвјАзЩЋЕНН№ЩЋзюКѓЕНКкАЕЕФбеЩЋБфЛЏЁЃЖјдкЕчГЁЕФЕїНкЯТЃЌБЁФЄЕФЩЯЯТБэУцЙтЛЌЃЌШыЩфЙтЗЂЩњБЁФЄИЩЩцЃЌЪЙЕУвКЬЌН№ЪєБэУцПЩвдГіЯжРрВЪКчЩЋЕФЗжВМЁЃДЫНсЙћЮЊПЊЗЂОпгажЧФмЮБзАЙІФмЕФШсадЛњЦїШЫЕФЩшМЦЬсЙЉСЫживЊЫМТЗЃЈЭМ2ЃЉЁЃ
ЁЁЁЁИУбаОПРДздгкжаЙњПЦбЇдКДѓбЇВЉЪПЩњЕМЪІЁЂРэЛЏММЪѕбаОПЫљЕФШФЮАбаОПдБКЭЫЮт§баОПдБЕФКЯзїЃЌВЂЗЂБэгкACS Applied Materials & InterfacesЦкПЏЃЌТлЮФБъЬтЮЊColoration of Liquid-Metal Soft Robots: From Silver-white to IridescentЁЃТлЮФЕквЛзїепЮЊЮДРДММЪѕбЇдКвКЬЌН№ЪєНЬбаЪвжБВЉбаОПЩњКѓвЧКЭББОЉНЈжўДѓбЇСЊКЯХрбјбаОПЩњГЃ№ЉЁЃ
ЁЁЁЁЯрЙиЙЄзїЕУЕНСЫЙњМвздШЛПЦбЇЧрФъЛљН№МАжиЕуЛљН№ЁЂББОЉЪаПЦЮЏжиДѓзЈЯюЕФДѓСІжЇГжЁЃ
ЁЁЁЁЮФеТСДНгЃКhttp://dx.doi.org/10.1021/acsami.8b13815
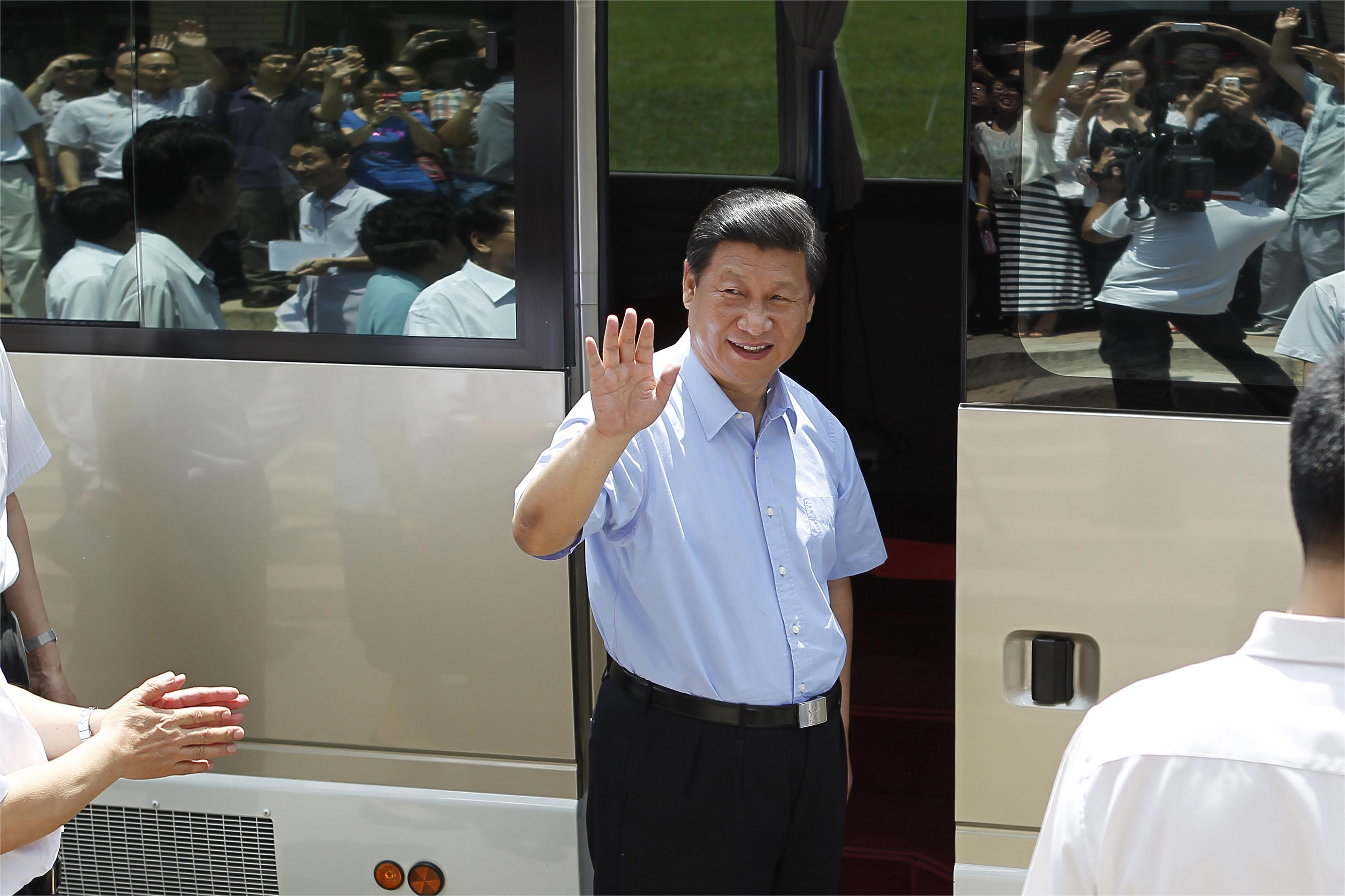
 ЭМ1 вКЬЌН№ЪєНсЙЙЩЋМАЦфБфЩЋдРэ
ЭМ1 вКЬЌН№ЪєНсЙЙЩЋМАЦфБфЩЋдРэ
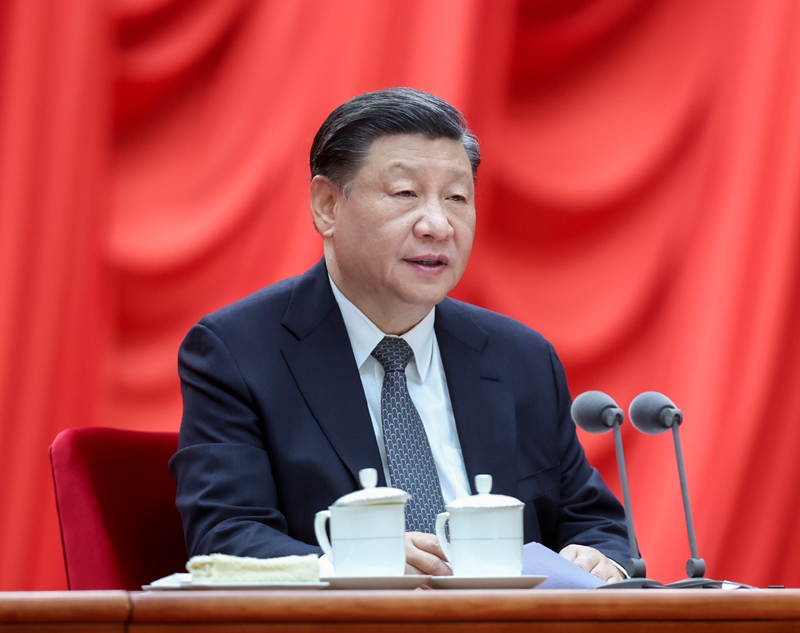
 ЭМ2 вКЬЌН№ЪєПЩЮБзАБфЩЋЕФШсадЛњЦїШЫеЙЪО
ЭМ2 вКЬЌН№ЪєПЩЮБзАБфЩЋЕФШсадЛњЦїШЫеЙЪО
д№Бр ЃКЛЦЧЩ
зюаТЖЏЬЌ
-
2019/03/25ЙужнЕиЛЏЫљдкГЄАзЩНШ§ЭђФъЧАДѓХчЗЂЪТМўЕФГѕДЮРхЖЈКЭОЋШЗЖЈФъШЁЕУбаОПНјеЙ
-
2019/03/25ЙужнЕиЛЏЫљНсКЯдзгСІЯдЮЂОЕКЭФЩУзбЙКлНсКЯдЮЛБэеїВтЖЈвГбвжагаЛњжЪЕФСІбЇаджЪ
-
2019/03/25вХДЋгыЗЂг§ЫљЭѕЙњЖАбаОПзщЗЂЯжВЮгыДѓЖЙдэмеДгАћжЪЕНвКХнзЊдЫЕААз
-
2019/03/25вХДЋгыЗЂг§ЫљИпВЪЯМбаОПзщгІбћдкNature Reviews GeneticsЗЂБэЁАЛљвђзщАаЯђаоЪЮЙЄОпМАЦфдкзїЮяг§жжжаЕФЧАбигІгУЁБзлЪіЮФеТ
-
2019/03/25бЧШШДјЩњЬЌЫљгЁгіСњдКЪПЭХЖгЭъГЩЕкЖўХњжэЬхЯИАћжиРызггеБфЗјееЪЕбщ